
学生发展:我院第二届本科生程序设计竞赛回顾
COMPETITION
为提高学生编程能力和测绘专业素养,培养学生用编程手段解决实际专业问题的能力,激发学生创新思维和科研热情,我院举办了第二届本科生程序设计竞赛,本次比赛同时也是测绘学院本科劳动教育课的一个重要组成部分。竞赛自2022年4月29日14:30起,为期一天通过本次竞赛实战,充分锻炼了同学们的动手编程能力和团队协作能力,激发了学科认同感。最终一等奖获得者为刘王军、张展鹏、黄蔚鸿组。二等奖获得者为沈新然、黎锦鹏、陈佳斌、易启亮组。三等奖获得者为贺骏、何子俊、肖楷民组和谢钰臻、胡同希、朱良辰组。
4月29日14:30,竞赛开幕式在教学楼B501机房举行,黄旭老师主持开幕式,对竞赛规则和赛题作了详细介绍。许粤副书记、惠凤鸣副院长分别作了发言,鼓励学生积极投入竞赛。

黄旭老师主持开幕式

许粤副书记发言

惠凤鸣副院长发言
本次竞赛赛题有两道。第一道题是数字表面模型融合,由黄旭老师提供。题目提供多组同一地区、精度较低的高分辨率光学卫星DSM产品,要求选手将其融合为一组高精度的DSM产品。第二道题是无人机航线规划,由张书航老师提供。题目给定三维场景、拍照点、无人机起飞点,要求选手在限制条件下,规划出耗时尽可能少的航线。经过一天的思考与编程,最终各组按时提交作品。
经评定,获得一等奖的小组为刘王军、张展鹏、黄蔚鸿组,获得二等奖的小组为沈新然、黎锦鹏、陈佳斌、易启亮组,获得三等奖的小组分别为贺骏、何子俊、肖楷民组和谢钰臻、胡同希、朱良辰组。以下是部分小组成果展示和小组竞赛总结。
第一题-数字表面模型融合:
竞赛总结(刘王军、张展鹏、黄蔚鸿组):
对于本次的DSM融合问题,我们首先面对的问题是所有DSM影像未在像素级别上对齐,对此我们选定其中一幅影像为基准,利用各幅影像的地理配置文件,将所有影像重采样到同一个影像坐标下。随后,考虑到一些区域在部分DSM影像中存在异常值,我们首先利用正射影像中的0值初步判断并排除DSM中的异常值,随后使用修正的阿尔法均值滤波对每一个像素进行融合,排除残余异常值的同时融合各DSM中的信息。
成果展示(刘王军、张展鹏、黄蔚鸿组):
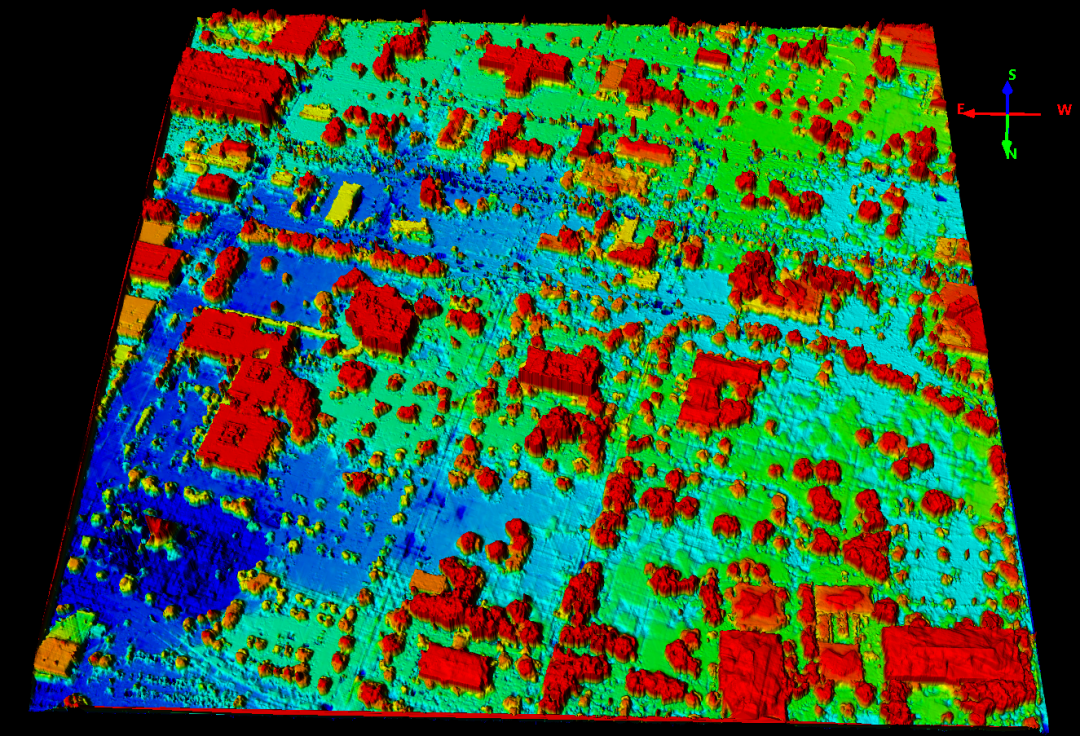


部分低精度DSM-整体展示

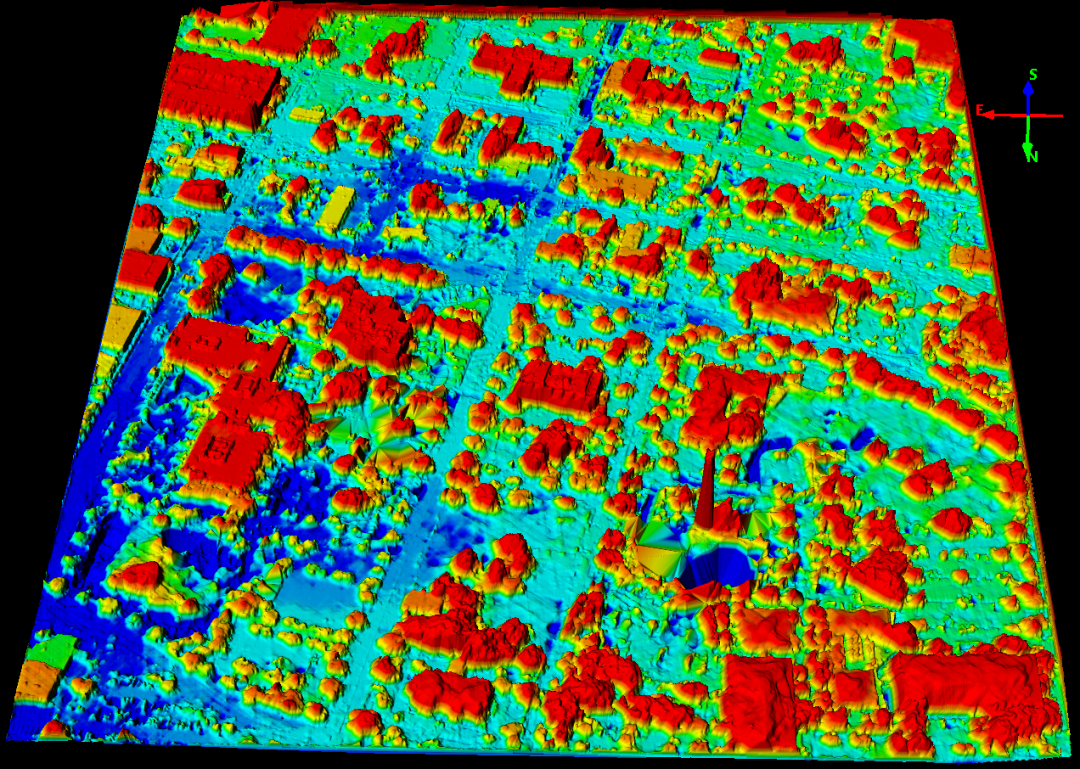
融合后DSM-整体展示
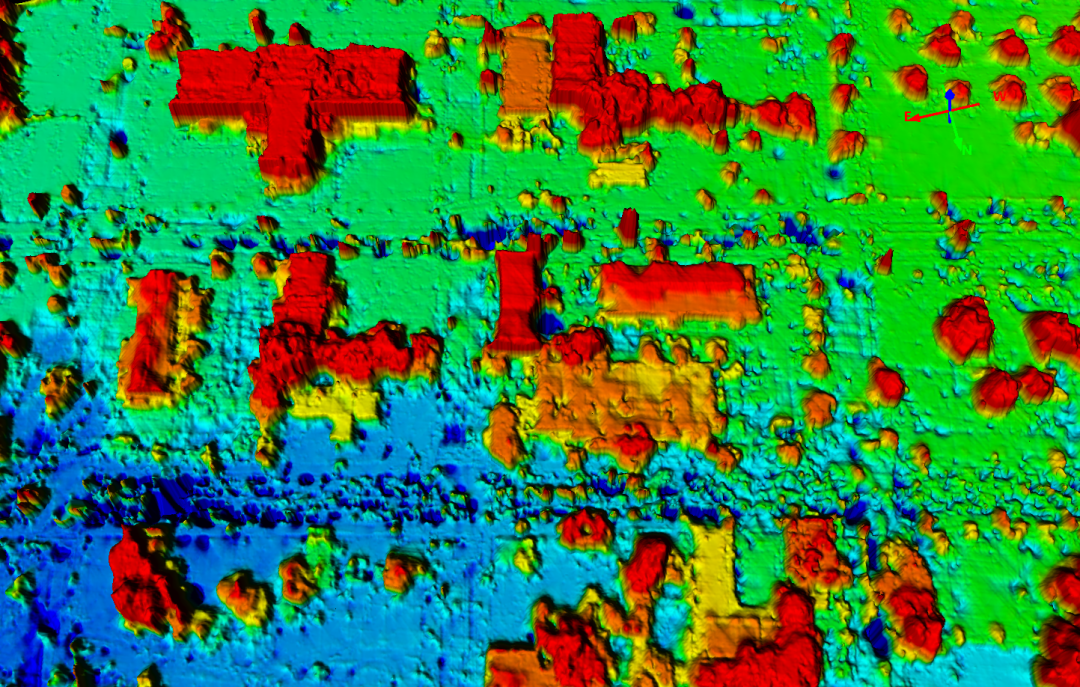


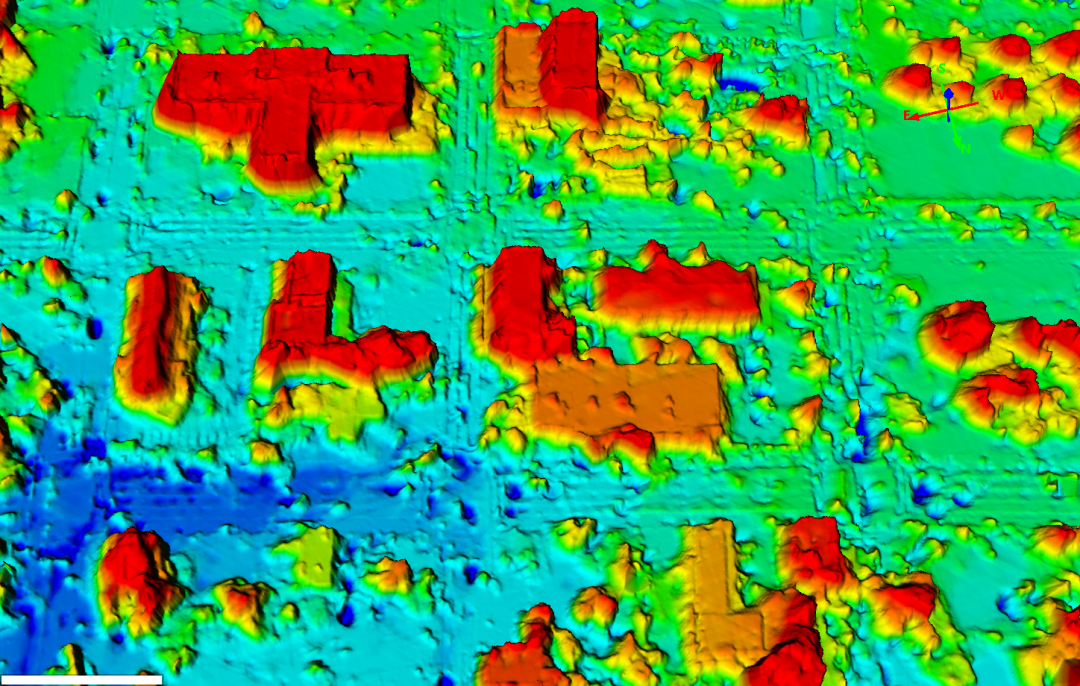
低精度DSM-局部展示
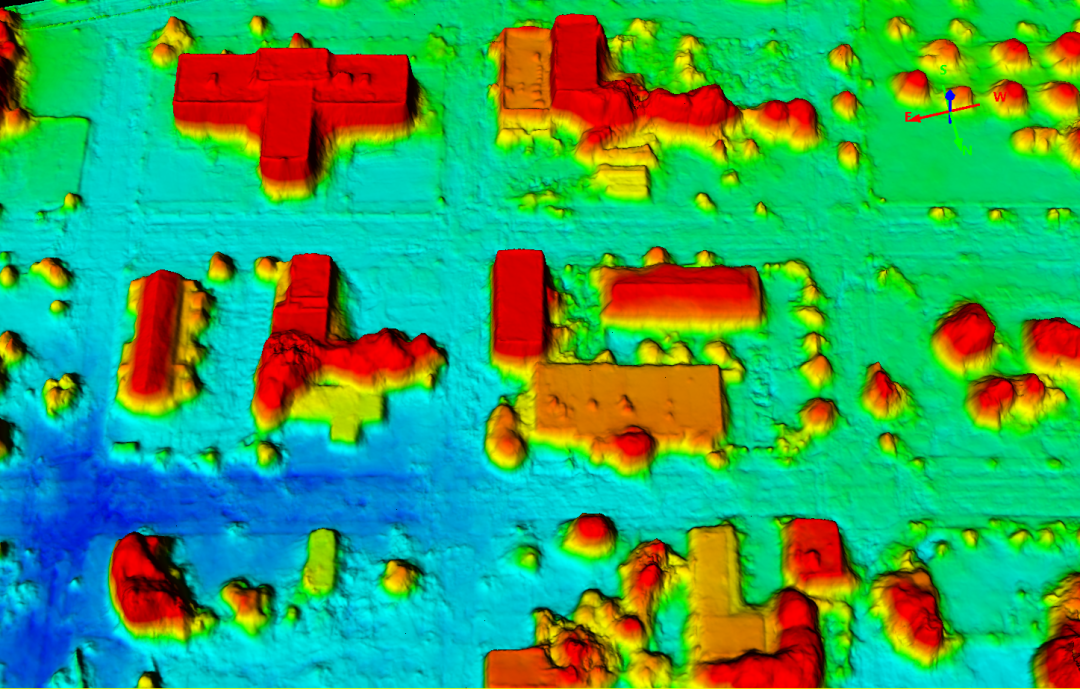
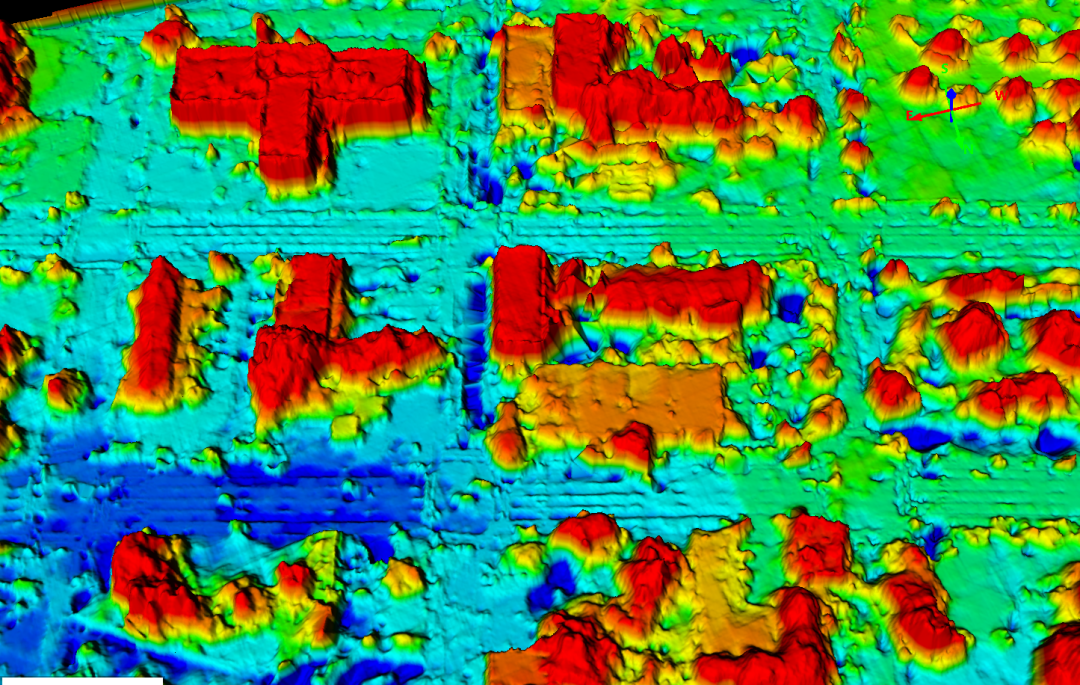
融合DSM-局部展示




融合后DSM叠加正射影像
第二题-无人机航线规划:
竞赛总结(刘王军、张展鹏、黄蔚鸿组):
本次比赛刘王军和黄蔚鸿同学负责本次的航线规划问题。这个问题可以抽象为旅行商问题,不过有一部分点之间存在障碍,没有通路。首先我们求解裸的旅行商问题,采用了蚁群算法、遗传算法等启发式算法。在启发式搜索得到的最短路基础上进行障碍的判断,对于遇到障碍的连线,采用暴力搜索的方法查找最邻近的中转点加入路径。
成果展示(刘王军、张展鹏、黄蔚鸿组):
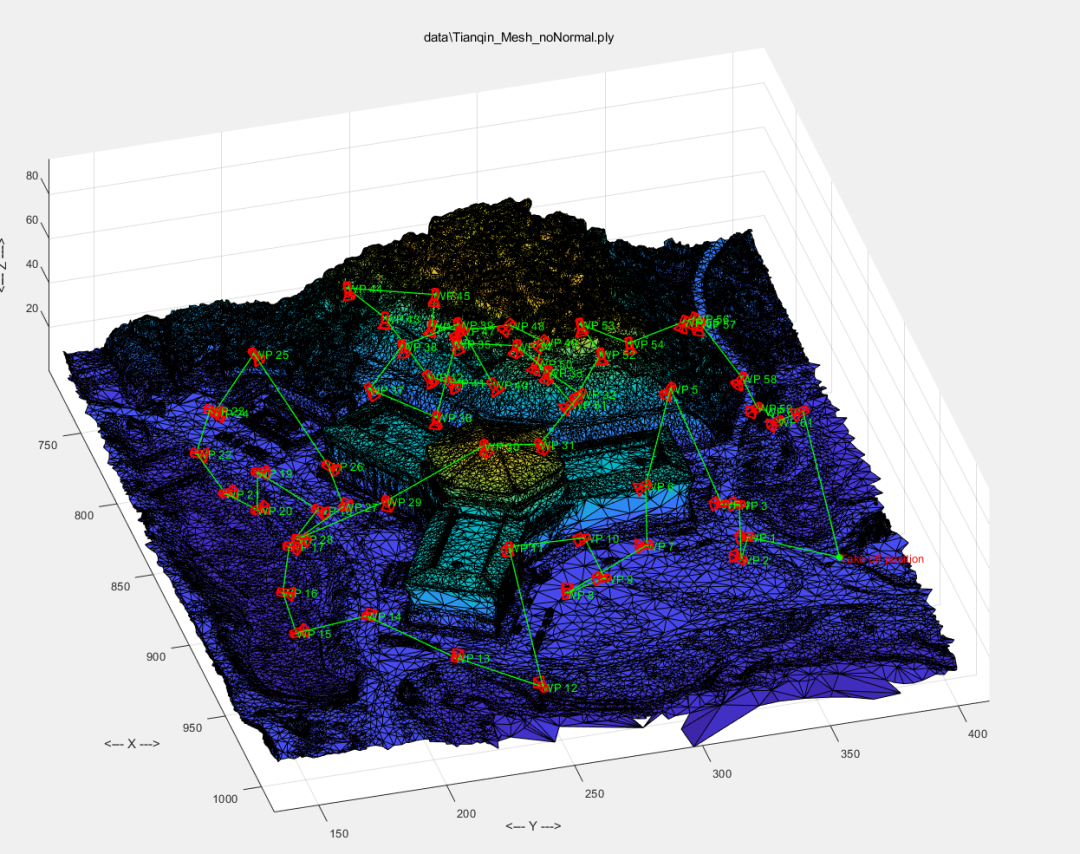
无人机航线规划成果
竞赛总结(沈新然、黎锦鹏、陈佳斌、易启亮组):
无人机航线规划可简化为旅行商问题(TSP),在需要遍历的航点不多的情况下可以直接进行求解。航点数较多时由于空间复杂度过高无法进行直接求解,因此考虑采用启发式算法迭代求解,如遗传算法、蚁群算法、退火算法等,这些方法可以通过增加迭代次数来提高求解精度。
经测试,遗传算法的求解精度最高,因此最终采用遗传算法完成对无人机航线的规划。
针对特殊情况(无人机与建筑或山体相撞),锦鹏完成了增添额外航点的算法来进行规避。
综上,最后我们采用遗传算法求解TSP问题与局部避障算法给出了无人机航线规划问题的解决方案。
成果展示(沈新然、黎锦鹏、陈佳斌、易启亮组):
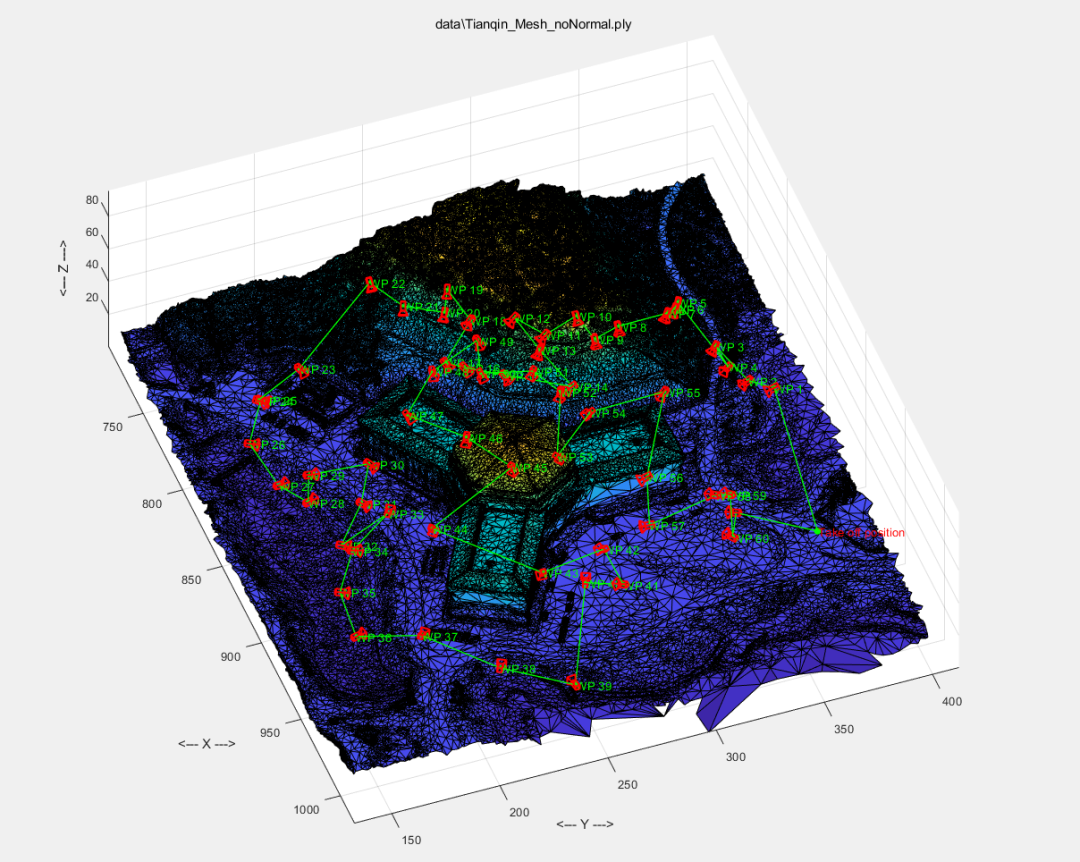
无人机航线规划成果