重力遥感与导航团队

首席科学家:钟敏 教授
团队成员

冯伟 教授

杨萌 副教授

姜中山 副教授

燕兴元 副教授

易丁 副教授

熊宇昊 博士后

李为凯 博士后

胥灿灿 博士后
团队定位
中山大学遥感科学与技术学院重力遥感与导航团队重点发展精密重力测量技术、形变监测技术和卫星导航技术等。团队面向国际科技前沿,推动国内外重力卫星计划,参与我国“天琴二号”重力卫星科学应用系统建设,构建陆海空天一体化重力数据处理平台,发展高精度重力场融合与建模技术;构建基于卫星重力、GNSS和InSAR等多源大地测量手段的全球质量迁移变化监测体系,推进卫星大地测量学与水文学、海洋学和冰冻圈科学等多领域的交叉创新;面向国家时空基准战略布局,推动北斗精密服务,发展高精度组合导航与定位技术,开展陆海统筹的高程基准统一研究;面向粵港澳大湾区建设需要,发展服务低空经济、防灾减灾和海洋环境监测的低成本GNSS/IMU组合导航技术、星基增强实时定位技术、低成本电离层监测与建模技术、GNSS-R技术与高精度地表形变监测技术,发展空天地海多平台融合的高分辨率海底地形重构技术。
研究方向
精密重力测量与科学应用,形变监测(GNSS、InSAR、SLR/LLR、DAS),海洋测绘、导航与定位,GNSS电离层监测与建模,时空基准与地球自转,行星大地测量。
研究成果及进展
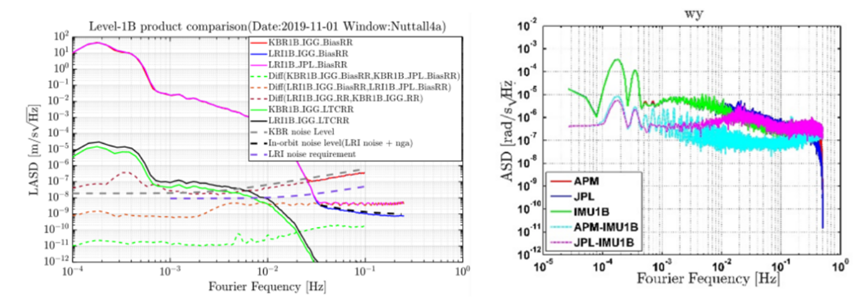
1. 建立重力卫星原始数据预处理系统平台,并服务于我国自主重力卫星ChiGAM的建设和发展。基于该平台得到GRACE Follow-On Level-1B级产品与国际公布产品的精度相当,激光干涉测距数据预处理和星敏感器数据预处理的精度均优于国际公布产品。研究成果成功应用于我国首颗重力卫星的星间测距数据预处理。
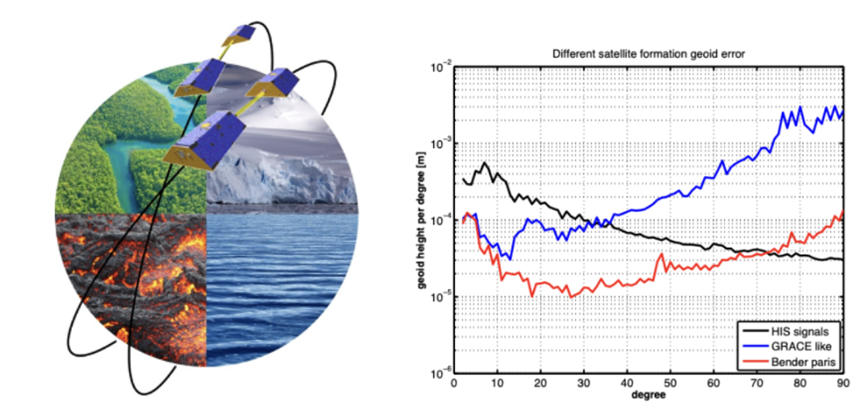
2. 突破卫星重力场反演核心技术,实现高精度时变重力场产品及软件的自主研制,在ICGEM网站发布了APM-SYSU时变重力场模型;主持“中欧下一代重力卫星”国际合作,开展了下一代重力卫星模拟仿真,推动我国重力卫星计划的建设实施。
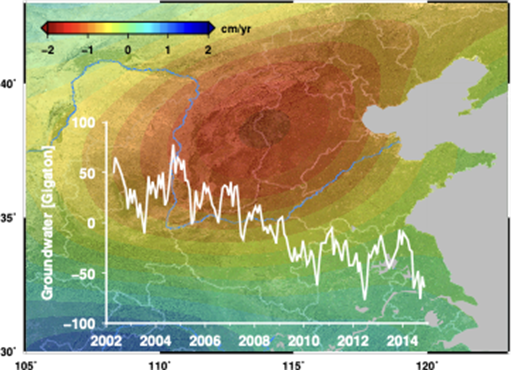
3. 在卫星重力应用领域,基于卫星重力开展了全球和区域陆地水/地下水变化监测,首次定量估计华北地下水储量变化的时空分布和长期趋势,加深了对华北地区深层地下水变化的认识;“基于重力卫星的大尺度干旱遥感监测系统”成功入选水利部《2021年度成熟适用水利科技成果推广清单》。
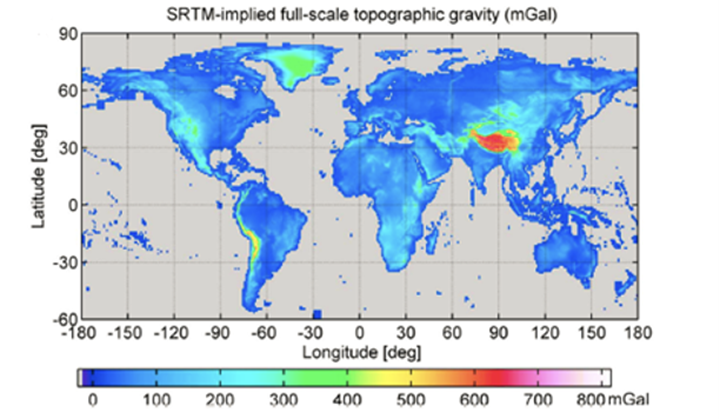
4. 完善超高阶重力场建模理论与方法,构建了高精度计算软件平台,发布首个全球地形重力场模型,该模型可广泛用于区域高精度大地水准面的确定、全球高程基准的统一、地球内部结构反演等科学研究及应用。
5. 服务国家战略需求,参与建设“精密重力测量”国家重大科技基础设施,负责我国首个航空重力梯度标定场和重力测量评估单元的建设工作。
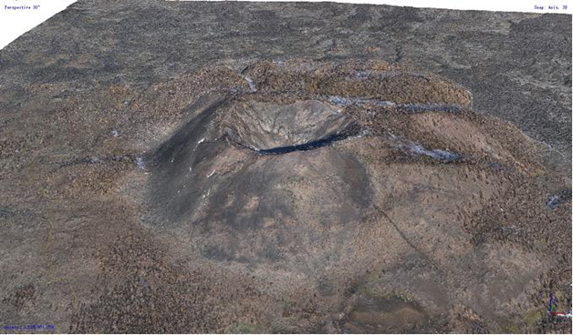
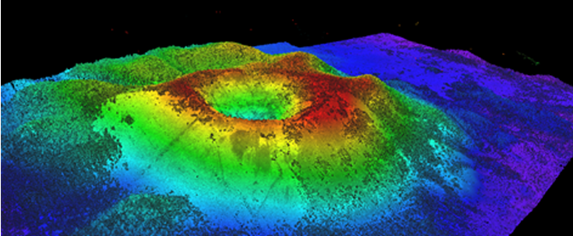
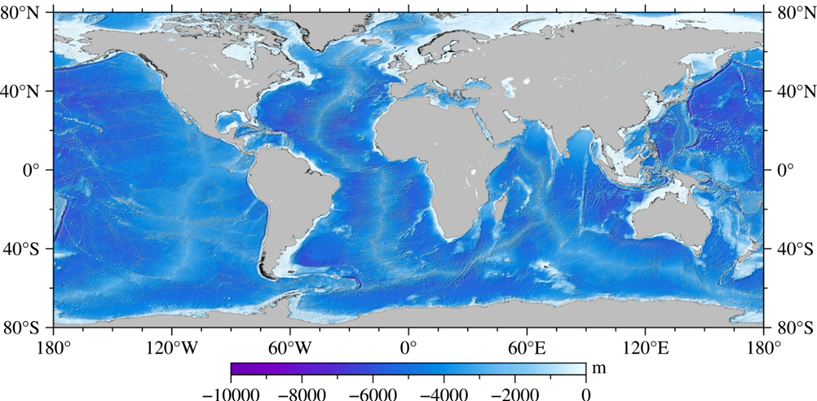
6. 建立空、天、地、海多源观测数据协同获取与处理方法,形成覆盖陆域、潮间带和浅海区的多尺度地形信息综合能力,突破重力、主被动光学及微波遥感协同反演的关键技术,实现不同传感器数据在空间、时间和物理层面的高效融合。研制并发布SYSU_Topoqu全球海底地形产品,精度与国际同等产品水平相当。
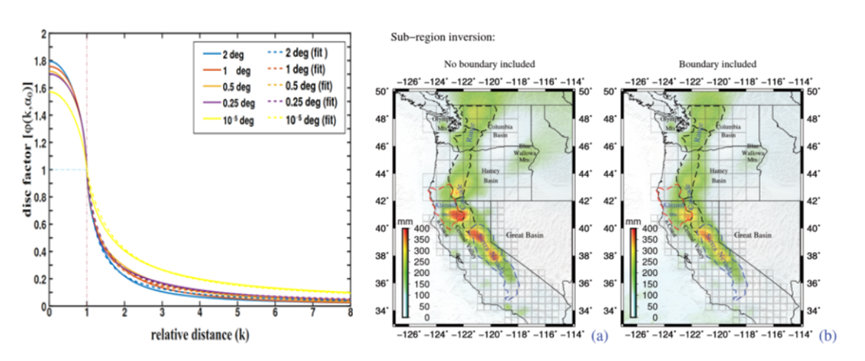
7. GNSS水文学新领域。基于负荷形变理论和空间约束反演模型,利用GNSS垂直位移实现区域水储量变化高精度反演。该方法已在美国西海岸区域进行应用,对空间约束的区域边界水储量的估算精度提高了10~20%。
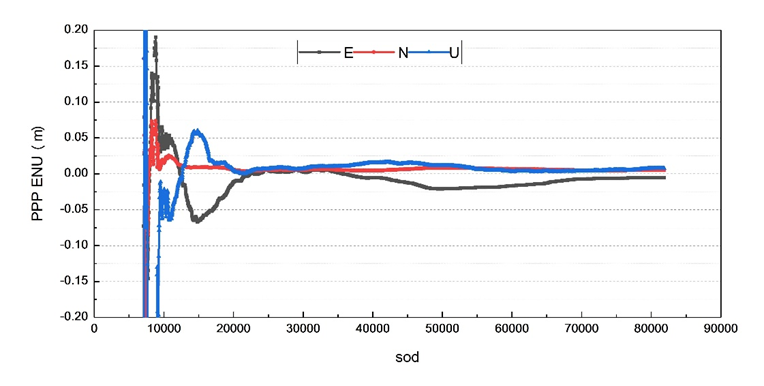
8. 建立了北斗二号和北斗三号卫星天线相位中心改正模型,北斗三号卫星先验光压模型,提高了北斗定轨和定位的精度;搭建了高精度GNSS定轨软件系统平台,实现多系统精密定轨、钟差、对流层、地球自转、框架坐标解算;开发了基于矩阵块消参的快速处理算法,实现了GNSS多系统“一步法”快速定轨及钟差快速加密。基于以上的软件系统平台、自建的光压和天线相位中心模型,解算了北斗二号、三号卫星B1I/B3I无电离层组合的精密轨道和30s间隔的精密钟差,北斗单系统定位在水平向精度优于5mm,高程向精度优于1cm的精度。
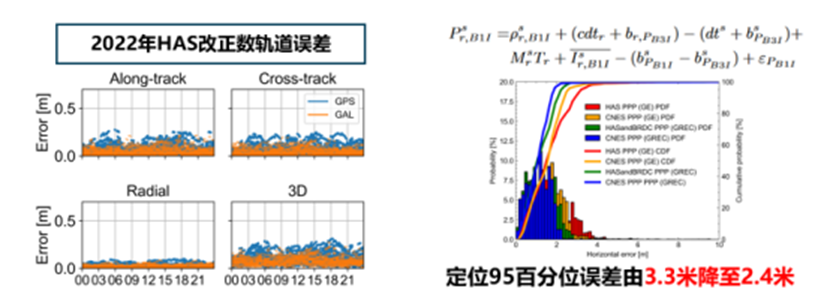
9. 星基导航增强技术方面,利用欧洲定轨中心(CODE)提供的精密产品,对Galileo高精度服务(HAS)轨道与卫星钟差改正在空间信号测距误差(SISRE)方面进行了系统评估,基于IGS测站数据的验证结果显示其已达到服务等级1(SL1)的性能要求。在此基础上,设计了一种基于历史训练数据的卫星钟差改正策略,并结合two-step双差预处理算法,有效降低了GPS与Galileo的SISRE,分别实现了38.6%和58.9%的性能提升。此外,为满足智能手机在复杂环境下对多星座、多观测值融合定位的需求,进一步研发了融合HAS改正数与广播星历信息的定位方法(HASandBRDC算法),可将智能手机定位95%分位误差由3.3米显著降低至2.4米,验证了星基增强技术在低成本终端高精度定位应用中的巨大潜力。
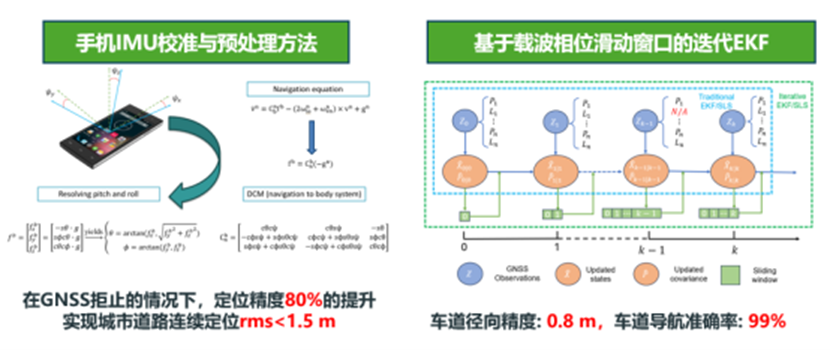
10. 针对智能手机在城市峡谷环境中的导航问题,利用手机自身的GNSS与IMU观测数据,设计了面向IMU原始数据的预处理方法,在城市峡谷与短隧道等复杂场景下显著提升了GNSS/IMU紧组合导航精度。在此基础上,研发了结合自适应扩展卡尔曼滤波(AEKF)的PPP增强算法(Enhanced PPP),相较传统PPP方法,定位精度提升超过46%。同时,提出了一种基于载波相位历史信息的滑动窗口迭代卡尔曼滤波(IEKF)方法,有效提升了周跳探测成功率达65%以上。综合多源观测与算法优化,在真实城市道路环境中实现了实时亚米级车道定位精度(约0.8米),车道导航准确率达到99%。