
专业科普: 利器:激光雷达遥感让遗址“现形”
一、激光雷达为何物?
传统遥感技术对于密林下或者近岸水下考古效果甚微,主要原因是难以获取林下或者水下的地表三维信息, 而这些信息是考古学家解译和分析古遗址空间分布与结构的最基本资料之一。激光雷达( Light Detection And Ranging, LiDAR)是最新发展发展起来的主动遥感技术,能够穿透密林或者一定深度的水体,极大地提高了三维空间数据的获取效率,其丰富的产品形式满足了不同行业领域和不同应用目的的需要。
激光雷达测距系统种类繁多,从搭载平台,并兼顾遗产保护和发现的应用角度,可分为地面激光雷达(Terrestrial Laser Scanning,TLS)和机载激光雷达系统(Airborne Laser System,ALS)。
地面激光雷达系统获取数据的方式灵活、成本低,而且点云数据密度、精度和空间分辨率更高,因此对目标表面的刻画也更加精细和完整,可用于文物、古建筑、石窟、石刻等的精细数字化、抢救性修复和存档等。
机载激光雷达系统能够穿透密林到达林下地面,或者穿透一定深度的水体达到水下,经过对点云数据进行滤波、分类和空间插值,得到林下或水下高分辨率的地表形态信息,适于大尺度或者区域尺度的遥感考古。
二、激光雷达能做什么?
激光雷达技术在文化遗产考古中的应用可以概括为数字化保护和考古发现两方面,具体表现为以下五大功能:
1、文化遗产原始资料存档
地面激光雷达系统可以获取遗产表面高密度、高精度的三维点云,通过点云数据即可全方位显示遗产的细节特征和三维空间结构,并可精确量测,特别适于表面几何和纹理丰富的对象(如图1)。这些信息是遗产/遗址数字化存档最基本的空间信息,而地面激光雷达技术是被认为是目前实现这一目标的最佳手段。

▲ 左图为北京大学西门内华表原始点云数据右图为三维模型(部分)
2、考古现场数字化记录与保存
早期田野考古利用照片记录和展示考古发掘过程,难以定量化且信息不完整,部分遗址信息还可能丢失。地面激光雷达技术在获取考古现场高密度点云后,通过绘制发掘现场高精度的平面图以及地层断面图和探方详图,再现发掘现场;可进行遗物的三维量测、分析遗址表面侵蚀情况等,实现考古过程的动态展示、数字化记录和变化分析。如秦俑二号坑和三星堆遗址一号坑发掘和数字化建设等,地面激光雷达技术发挥了高效、高精度、全方位和动态实时的数据采集优势。
3、三维数字模型重建
地面激光雷达技术可应用于遗产本体的三维数字模型重建、抢救性修复、三维数字化管理和漫游等诸多方面。当前很多古建筑、石刻石窟、壁画等面临年久失修、自然风化和人为破坏等问题,其精细三维数字模型(如图2)被认为是当前“抢救”濒临损毁或消失的文化遗产的唯一途径。如2013年重庆大足石刻中千手观音断指的精细扫描和抢救性修复,以及北京大钟寺内永乐大钟上23万字铭文的三维扫描和重现等。
基于不同时期的三维数字模型,还可以进行遗产本体的动态变化分析和预测;对模型表面贴彩色纹理,可以得到遗址的真三维数字模型,通过互联网进行全方位展示、量测和漫游,让人有身临其境之感。

▲ 吴哥窟茶胶寺东门三维数字模型

▲ 安徽某古村落三维数字模型
4、林下考古
机载激光雷达技术是获取林下地形的最有效技术之一,为密林遥感考古提供了可能。在众多机载激光雷达遥感考古中,影响较大的是美国佛罗里达大学开展的玛雅新古城考古和澳大利亚悉尼大学牵头的吴哥遗址考古。
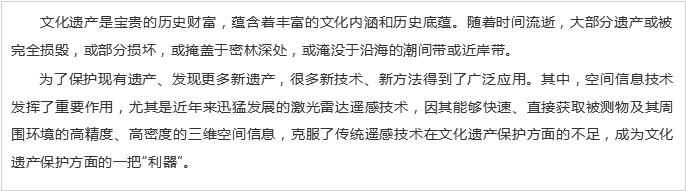
2010年在美国NASA资助下,佛罗里达大学利用机载激光雷达技术获取了伯利兹Caracol浓密雨林区的三维空间数据,绘制了林下精细的三维地形图,仅用4天时间便发现了玛雅古城此前未知的大量古建筑、古道路和梯田遗迹,重现了一座崭新的玛雅古城堡(图3)。与此前考古学家在该地区已经开展了25年的田野考古调查工作相比,机载激光雷达技术仅用一个月时间即新发现了近200km2的古遗迹,是过去25年间传统考古发现范围的8倍。

▲ 机载激光雷达技术在玛雅古城考古中的应用:上图为玛雅古城数字高程模型、水系和道路,下图为玛雅古城三维复原图
2012年,澳大利亚悉尼大学联合法国、英国、日本、匈牙利、美国、印尼、柬埔寨等国家,利用直升机搭载激光雷达系统获取了柬埔寨吴哥窟遗址及其周边森林区域的高密度点云数据,制作了吴哥地区高精度三维地形图(图4)。通过分析发现了隐藏于吴哥遗址北部库伦山区茂密森林和稻田下的吴哥古城遗迹,重绘了繁荣的吴哥古城。这一发现不仅将吴哥中心古城遗址的覆盖范围从早期的9km2扩展为35km2,而且将吴哥遗址的历史往前推进了350年。
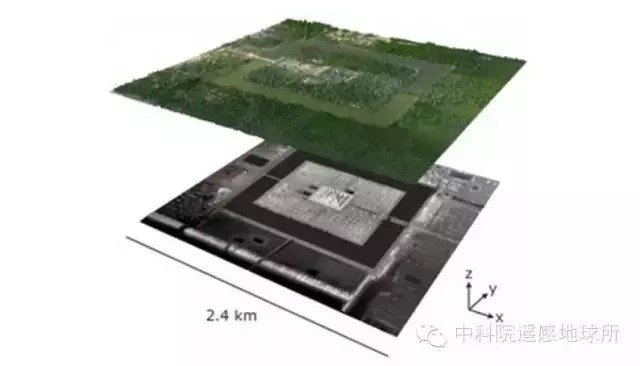
▲ 机载激光雷达技术发现柬埔寨吴哥窟古遗址
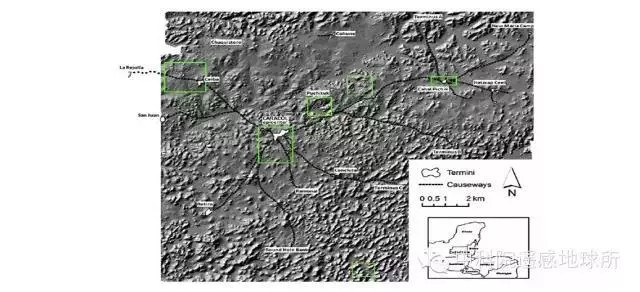
上图为利用航空影像生成的数字正射影像(DOM)、机载LiDAR点云数据提取的林下数字地面模型(DEM)下图为另一处遗址区域的DEM(绿色为以前发现的遗址,红色为激光雷达新发现的遗迹)
5、水下考古
水探测激光雷达(Airborne Laser Bathymetry,ALB)是另一种类型的机载激光雷达,与ALS系统相比,ALB系统采用了能穿透一定深度水体的绿激光器(532nm)。ALB系统在水下考古方面的应用远不如林下考古广泛,主要是该系统的应用成本较高,另一方面此类系统工作原理复杂,同时受水质及水中浮游生物、外界环境( 如风、浪等) 影响大, 而且测量的深度有限( 通常50m 以内, 少数系统可达80m- 100m)。图5是ALB系统工作示意图。2013年维也纳大学利用ALB系统在克罗地亚的亚德里亚沿海进行水下考古试验,获取了水下8m深处地形的回波信息,进而生成1m分辨率数字地形模型,发现了一个淹没于水下的古罗马村庄遗迹。
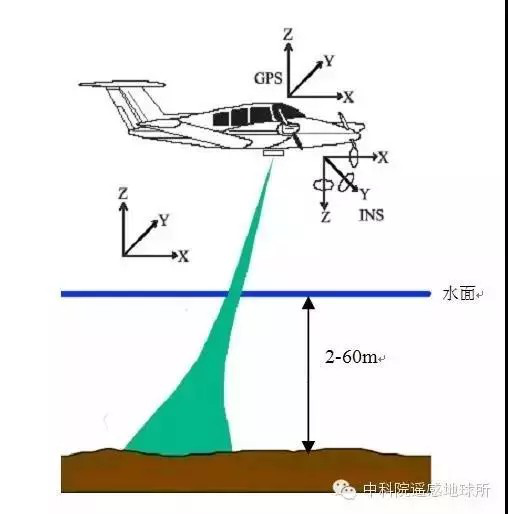
▲ ALB系统工作示意图

来源:空天信息