
大创项目展风采,科研育人结硕果——学院6项本科生项目获评优秀
导语:在2025年大创项目结题中,我院共6个大创项目获评优秀。各项目聚焦学科前沿,在极地观测、月球科研站建设等领域取得突出成果,多项技术已应用于实际场景,充分展现了我院学子的创新力与科研实力。
项目名称:面向粤港澳大湾区的多模态城市功能识别——以珠海市为例
团队成员:陈春松,侯懿宸,陈桓,李俊霖,付蓉
指导老师:陈一平副教授
项目针对粤港澳大湾区复杂城市环境中建筑功能识别难题,整合遥感影像、建筑轮廓、POI及高程模型等多源异构数据。在数据层面,团队构建覆盖近400万栋建筑的GBA-UBF数据集,集成高精度数字地面模型。在算法层面,团队创新提出LAGraph-PolyCMX算法框架,将POI语言信息与遥感影像、几何形态特征相结合,通过贝叶斯框架实现多源信息的优化融合,提升识别结果的鲁棒性。针对缺乏真值验证的难题,团队自主设计BFMI指标,为建筑物功能精度的定量评估提供可行方案。
项目相关成果已在第33届ACM SIGSPATIAL国际会议发表,并在第二十届地理信息科学理论与方法学术年会上作口头汇报。
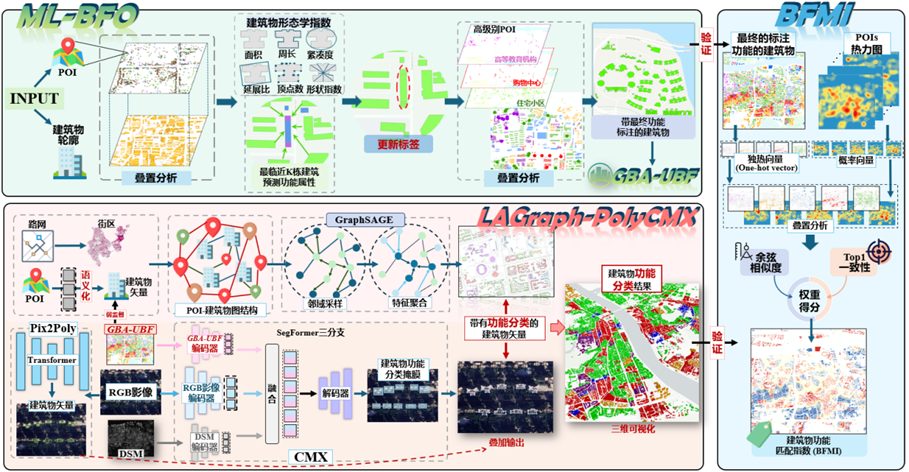
图1 项目总体流程图
项目名称:低延时北极冰基智能观测系统研制
团队成员:彭科霖、陶宇涵、王哲、祁航、罗凯
指导老师:程晓教授
项目针对北极海冰监测中卫星遥感时效性差、传统浮标成本高且难以高密度布设等问题,开发一套低延时北极冰基智能观测系统。团队创新采用XBee无线电链路替代卫星通信,利用无人机飞控模块,将成本降至传统浮标的数十分之一。系统采用抗寒椭圆外壳与模块化设计,支持秒级数据回传与高密度布设。
系统硬件端实现GNSS高频定位与近场稳定传输,软件端开发基于MAVLink协议的可视化观测平台,支持实时轨迹追踪与全球离线地图。该系统已在“中山大学极地”号2025年北极科考中成功应用,验证其在极地恶劣环境下的稳定性。项目荣获全国极地科学与教育创新教-学大赛一等奖,为极地科考提供“高频次、低延时、低成本”的新方案。

图2 研制系统随北极科考队部署实验
项目名称:GNSS-R海面测高天线配置及结果融合研究
团队成员:高宜枝、吴错、吴正宇、肖博睿
指导老师:燕兴元副教授
项目聚焦岸基GNSS-R海面测高技术,通过优化天线配置与数据融合算法,实现高精度水面高度监测。针对多系统测高偏差与多路径干扰等问题,团队创新性发现伪距测高信号的时延偏差,构建函数模型,建立星间差分融合方法消除系统误差;自主设计角度可调天线架与扼流圈设备,抗多路径效果提升25.7%,确定30°为最佳下天线倾角。结合质量控制与窗口滤波技术,实测测高精度从米级提升至30cm内的亚米级,滤波后实时精度可达20cm。
相关成果已形成论文《岸基多频多系统GNSS-R伪距时延参数特性分析及其改进方法》(改稿中),为海面及内陆水体高度监测提供高效可靠方案。
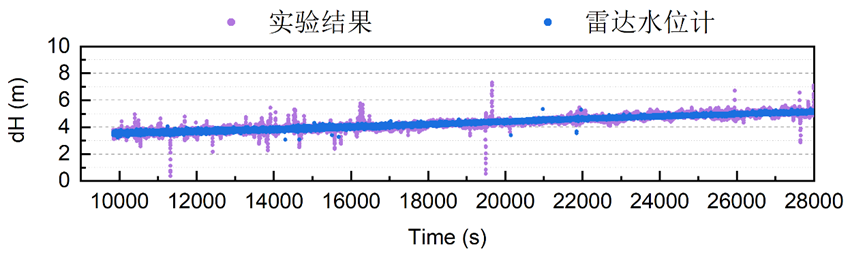
图3 GNSS-R星间差分融合测高结果与雷达测高真值对比图
项目名称:国际月球科研站沉浸式漫游交互系统设计与开发
团队成员:任益澜、邓杏儿、孙依娴、秦碧佳、李淏岚
指导老师:李媛副教授
项目以月球南极沙克尔顿坑为选址研究对象,围绕真实月表地形重建、科研站三维建模与沉浸式VR漫游三大任务展开,服务国际月球科研站(ILRS)建设需求。团队基于遥感影像与地形数据,引入LoGAN深度学习算法,重建高分辨率数字高程模型,构建约25平方公里高真实感月表场景,并设计集科研、生活与生态功能于一体的科研站模型。
系统基于Unreal Engine 5实现,支持VR设备交互,可沉浸式体验未来月球科研站场景,具备科研展示与航天科普应用潜力。
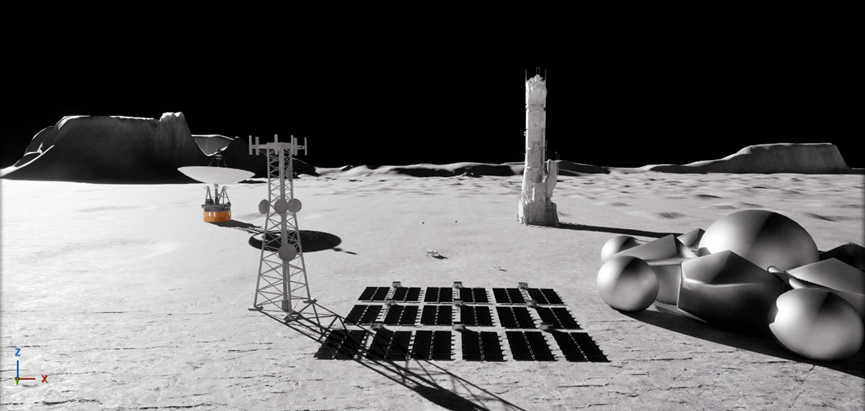
图4 月球科研站漫游系统外环境(UE中)
项目名称:基于可见光与热红外影像联合感知的道路目标检测技术研究
团队成员:周云天、陈风宇、蒙艳、余欣彤
指导老师:郑小坡副教授
针对自动驾驶在恶劣天气下感知模块可靠性不足的问题,项目研发一套集成双模态成像与深度学习的高精度目标检测系统。团队创新提出基于热红外与可见光联合的动态训练框架,解决多模态影像精准配准与自动化样本构建等核心难题,使系统具备感知精度随行驶里程增加而自主进化的能力。
在应用落地方面,项目成功开发出集成边缘计算平台与消费级热像仪的软硬件一体化系统,实现算法向嵌入式端的高效迁移。具有低成本、全天候运行优势,已在复杂道路环境下完成多项实地部署测试,各项指标均达预期。

图5 车载设备部署与实地测试
项目名称:基于街景和地图数据的盲道识别及制图研究
团队成员:张祉延、杨澳、朱岂、古心怡、范睿捷
指导老师:李唯嘉副教授
针对城市无障碍出行中盲道“有路无图”的痛点,项目利用人工智能技术构建高精度盲道地图。团队采集全球34个城市的百万级街景影像,构建大规模盲道语义分割数据集,利用SegNeXt等深度学习模型高效识别盲道区域。项目创新提出基于球面投影(ST)的视角转换算法,成功打通从“街景第一人称视角”到“地图俯瞰视角”的自动化制图链路。
团队完成包括中山大学珠海校区、新加坡、日本札幌等在内的多尺度盲道地图构建,并结合GIS技术对城市无障碍设施的通达性进行量化评估。该成果不仅为视障人士提供精细化的出行导航数据,也为智慧城市的无障碍规划与监管提供科学决策支持。

图6 上海世博中心周边高精度盲道地图